Note
Click here to download the full example code
STEPS (Hong Kong)
This example demonstrates how to make use of STEPS to perform 3-hour rainfall nowcasting with radar data in Hong Kong
Definitions
Import all required modules and methods:
# Python package to allow system command line functions
import os
# Python package to manage warning message
import warnings
# Python package for time calculations
import pandas as pd
# Python package for numerical calculations
import numpy as np
# Python package for xarrays to read and handle netcdf data
import xarray as xr
# Python package for text formatting
import textwrap
# Python package for projection description
from pyresample import get_area_def
# Python package for projection
import cartopy.crs as ccrs
# Python package for land/sea features
import cartopy.feature as cfeature
# Python package for reading map shape file
import cartopy.io.shapereader as shpreader
# Python package for creating plots
from matplotlib import pyplot as plt
# Python package for output grid format
from matplotlib.gridspec import GridSpec
# Python package for colorbars
from matplotlib.colors import BoundaryNorm, ListedColormap
from matplotlib.cm import ScalarMappable
# swirlspy data parser function
from swirlspy.rad.iris import read_iris_grid
# swirlspy test data source locat utils function
from swirlspy.qpe.utils import timestamps_ending, locate_file
# swirlspy regrid function
from swirlspy.core.resample import grid_resample
# swirlspy standardize data function
from swirlspy.utils import FrameType, standardize_attr, conversion
# swirlspy pysteps integrated package
from swirlspy.qpf import steps, dense_lucaskanade
# directory constants
from swirlspy.tests.samples import DATA_DIR
from swirlspy.tests.outputs import OUTPUT_DIR
warnings.filterwarnings("ignore")
Define the working directory and nowcast parameters
radar_dir = os.path.abspath(
os.path.join(DATA_DIR, 'iris/ppi')
)
# Set nowcast parameters
n_timesteps = int(3 * 60 / 6) # 3 hours, each timestamp is 6 minutes
n_ens_members = 3
Define the User Grid
area_id = "hk1980_250km"
description = ("A 250 m resolution rectangular grid "
"centred at HKO and extending to 250 km "
"in each direction in HK1980 easting/northing coordinates")
proj_id = 'hk1980'
projection = ('+proj=tmerc +lat_0=22.31213333333334 '
'+lon_0=114.1785555555556 +k=1 +x_0=836694.05 '
'+y_0=819069.8 +ellps=intl +towgs84=-162.619,-276.959,'
'-161.764,0.067753,-2.24365,-1.15883,-1.09425 +units=m '
'+no_defs')
x_size = 500
y_size = 500
area_extent = (587000, 569000, 1087000, 1069000)
area_def_tgt = get_area_def(
area_id, description, proj_id, projection, x_size, y_size, area_extent
)
Define the plotting function:
# Defining plot parameters
map_shape_file = os.path.abspath(os.path.join(
DATA_DIR,
'shape/hk'
))
# coastline and province
map_with_province = cfeature.ShapelyFeature(
list(shpreader.Reader(map_shape_file).geometries()),
ccrs.PlateCarree()
)
def plot_base(ax: plt.Axes, extents: list, crs: ccrs.Projection):
ax.set_extent(extents, crs=crs)
# fake the ocean color
ax.imshow(np.tile(np.array([[[178, 208, 254]]],
dtype=np.uint8), [2, 2, 1]),
origin='upper',
transform=ccrs.PlateCarree(),
extent=[-180, 180, -180, 180],
zorder=-1)
# coastline, province and state, color
ax.add_feature(map_with_province,
facecolor=cfeature.COLORS['land'], edgecolor='none', zorder=0)
# overlay coastline, province and state without color
ax.add_feature(map_with_province, facecolor='none',
edgecolor='gray', linewidth=0.5)
ax.set_title('')
Loading radar data
# Log the start time
start_time = pd.Timestamp.now()
# Define the basetime
basetime = pd.Timestamp('201902190800')
# Generate the timestamps and locate the files
located_files = []
radar_ts = timestamps_ending(
basetime,
duration=pd.Timedelta(minutes=12),
exclude_end=False
)
for timestamp in radar_ts:
located_files.append(locate_file(radar_dir, timestamp))
# Read in the data
reflectivity_list = [] # stores reflec from read_iris_grid()
for filename in located_files:
reflec = read_iris_grid(filename)
reflectivity_list.append(reflec)
# Reproject the radar data to the user-defined grid
area_def_src = reflectivity_list[0].attrs['area_def']
reproj_reflectivity_list = []
for reflec in reflectivity_list:
reproj_reflec = grid_resample(
reflec, area_def_src, area_def_tgt,
coord_label=['x', 'y']
)
reproj_reflectivity_list.append(reproj_reflec)
# Fill in all fields of the xarray of reflectivity data
frames = xr.concat(reproj_reflectivity_list,
dim='time').sortby(['y'], ascending=False)
standardize_attr(frames, frame_type=FrameType.dBZ)
# Convert from reflectivity to rainfall rain
frames = conversion.to_rainfall_rate(frames, True, a=58.53, b=1.56)
# Set the fill value
frames.attrs['zero_value'] = -15.0
# apply threshold to -10dBR i.e. 0.1mm/h
threshold = -10.0
frames.values[frames.values < threshold] = frames.attrs['zero_value']
# Set missing values with the fill value
frames.values[~np.isfinite(frames.values)] = frames.attrs['zero_value']
# Log the time for record
initialising_time = pd.Timestamp.now()
Running Lucas Kanade Optical flow and S-PROG
# Estimate the motion field with Lucas Kanade
motion = dense_lucaskanade(frames)
# Log the time for record
motion_time = pd.Timestamp.now()
# Nowcast using STEP
forcast_frames = steps(
frames,
motion,
n_timesteps,
n_ens_members=n_ens_members,
n_cascade_levels=8,
R_thr=threshold,
kmperpixel=2.0,
decomp_method="fft",
bandpass_filter_method="gaussian",
noise_method="nonparametric",
probmatching_method="mean",
vel_pert_method="bps",
mask_method="incremental",
seed=24
)
steps_time = pd.Timestamp.now()
Out:
Computing STEPS nowcast:
------------------------
Inputs:
-------
input dimensions: 500x500
km/pixel: 2
time step: 6 minutes
Methods:
--------
extrapolation: semilagrangian
bandpass filter: gaussian
decomposition: fft
noise generator: nonparametric
noise adjustment: no
velocity perturbator: bps
conditional statistics: no
precip. mask method: incremental
probability matching: mean
FFT method: numpy
domain: spatial
Parameters:
-----------
number of time steps: 30
ensemble size: 3
parallel threads: 1
number of cascade levels: 8
order of the AR(p) model: 2
velocity perturbations, parallel: 10.88,0.23,-7.68
velocity perturbations, perpendicular: 5.76,0.31,-2.72
precip. intensity threshold: -10
************************************************
* Correlation coefficients for cascade levels: *
************************************************
-----------------------------------------
| Level | Lag-1 | Lag-2 |
-----------------------------------------
| 1 | 0.998995 | 0.996974 |
-----------------------------------------
| 2 | 0.998526 | 0.996270 |
-----------------------------------------
| 3 | 0.993048 | 0.983181 |
-----------------------------------------
| 4 | 0.972410 | 0.927100 |
-----------------------------------------
| 5 | 0.868747 | 0.695263 |
-----------------------------------------
| 6 | 0.515560 | 0.239395 |
-----------------------------------------
| 7 | 0.103358 | 0.020485 |
-----------------------------------------
| 8 | 0.003543 | 0.011290 |
-----------------------------------------
****************************************
* AR(p) parameters for cascade levels: *
****************************************
------------------------------------------------------
| Level | Phi-1 | Phi-2 | Phi-0 |
------------------------------------------------------
| 1 | 1.505001 | -0.506515 | 0.038644 |
------------------------------------------------------
| 2 | 1.264189 | -0.266055 | 0.052323 |
------------------------------------------------------
| 3 | 1.205369 | -0.213808 | 0.114992 |
------------------------------------------------------
| 4 | 1.302659 | -0.339619 | 0.219412 |
------------------------------------------------------
| 5 | 1.079346 | -0.242416 | 0.480483 |
------------------------------------------------------
| 6 | 0.534103 | -0.035967 | 0.856299 |
------------------------------------------------------
| 7 | 0.102334 | 0.009908 | 0.994595 |
------------------------------------------------------
| 8 | 0.003503 | 0.011277 | 0.999930 |
------------------------------------------------------
Starting nowcast computation.
Computing nowcast for time step 1... done.
Computing nowcast for time step 2... done.
Computing nowcast for time step 3... done.
Computing nowcast for time step 4... done.
Computing nowcast for time step 5... done.
Computing nowcast for time step 6... done.
Computing nowcast for time step 7... done.
Computing nowcast for time step 8... done.
Computing nowcast for time step 9... done.
Computing nowcast for time step 10... done.
Computing nowcast for time step 11... done.
Computing nowcast for time step 12... done.
Computing nowcast for time step 13... done.
Computing nowcast for time step 14... done.
Computing nowcast for time step 15... done.
Computing nowcast for time step 16... done.
Computing nowcast for time step 17... done.
Computing nowcast for time step 18... done.
Computing nowcast for time step 19... done.
Computing nowcast for time step 20... done.
Computing nowcast for time step 21... done.
Computing nowcast for time step 22... done.
Computing nowcast for time step 23... done.
Computing nowcast for time step 24... done.
Computing nowcast for time step 25... done.
Computing nowcast for time step 26... done.
Computing nowcast for time step 27... done.
Computing nowcast for time step 28... done.
Computing nowcast for time step 29... done.
Computing nowcast for time step 30... done.
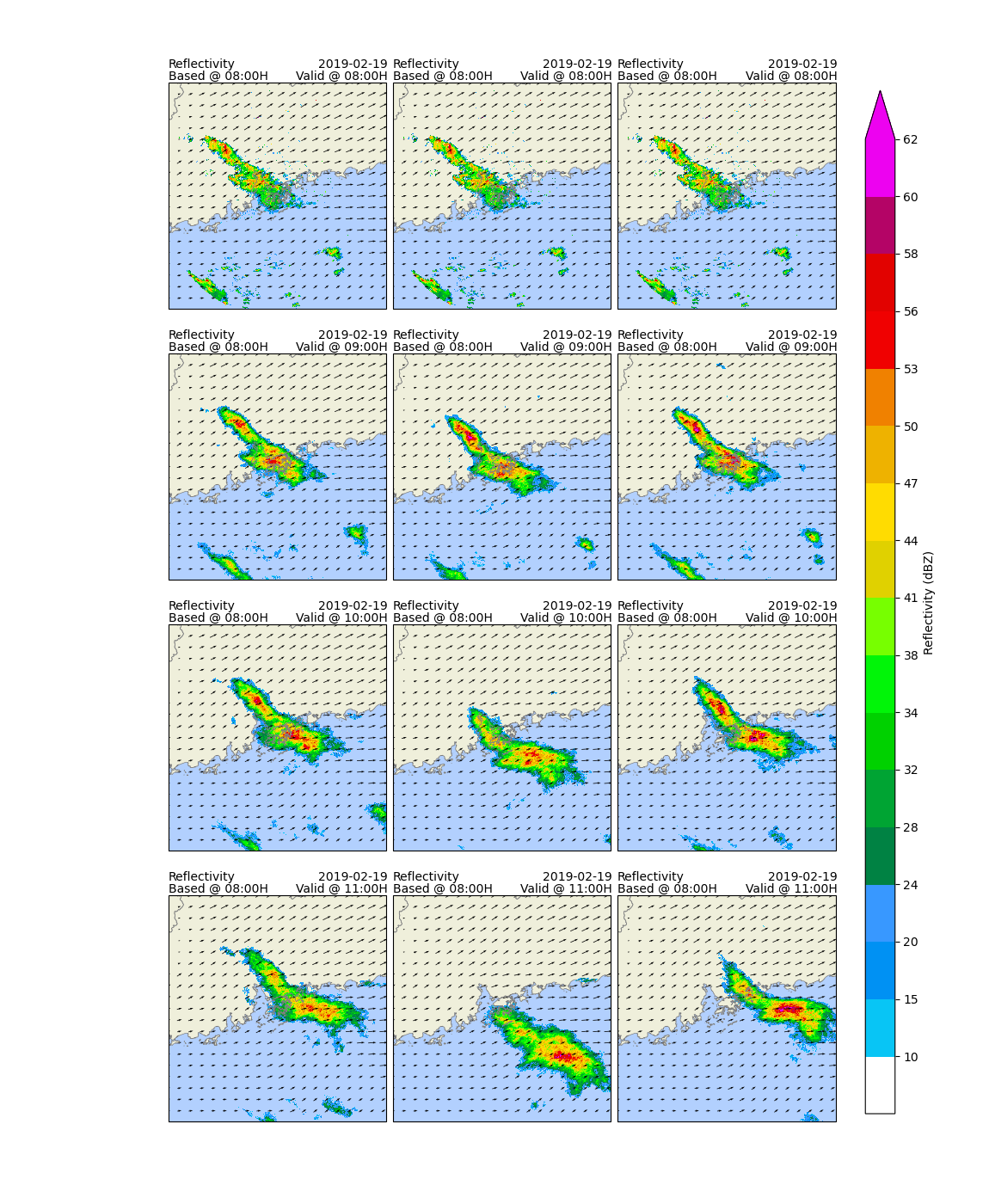
Generating radar reflectivity maps
# Defining the colour scale
levels = [
-32768,
10, 15, 20, 24, 28, 32,
34, 38, 41, 44, 47, 50,
53, 56, 58, 60, 62
]
cmap = ListedColormap([
'#FFFFFF00', '#08C5F5', '#0091F3', '#3898FF', '#008243', '#00A433',
'#00D100', '#01F508', '#77FF00', '#E0D100', '#FFDC01', '#EEB200',
'#F08100', '#F00101', '#E20200', '#B40466', '#ED02F0'
])
norm = BoundaryNorm(levels, ncolors=cmap.N, clip=True)
mappable = ScalarMappable(cmap=cmap, norm=norm)
mappable.set_array([])
# Defining the crs
crs = area_def_tgt.to_cartopy_crs()
# Defining area
x = frames.coords['x'].values
y = frames.coords['y'].values
extents = [
x[0], y[0],
x[-1], y[-1]
]
# Generate a time steps for every hour
time_steps = [
(basetime + pd.Timedelta(minutes=6*i))
for i in range(n_timesteps + 1) if i % 10 == 0
]
ref_frames = conversion.to_reflectivity(forcast_frames, True)
ref_frames.data[ref_frames.data < 0.1] = np.nan
qx = motion.coords['x'].values[::25]
qy = motion.coords['y'].values[::25]
qu = motion.values[0, ::25, ::25]
qv = motion.values[1, ::25, ::25]
n_rows = len(time_steps)
fig: plt.Figure = plt.figure(
figsize=(n_ens_members * 3.5 + 1, n_rows * 3.5), frameon=False)
gs = GridSpec(n_rows, n_ens_members, figure=fig,
wspace=0.03, hspace=0, top=0.95, bottom=0.05, left=0.17, right=0.845)
for row in range(n_rows):
for col in range(n_ens_members):
ax: plt.Axes = fig.add_subplot(gs[row, col], projection=crs)
ensemble = ref_frames.coords['ensembles'].values[col]
t = time_steps[row]
# plot base map
plot_base(ax, extents, crs)
# plot reflectivity
member = ref_frames.sel(ensembles=ensemble)
frame = member.sel(time=t)
im = ax.imshow(frame.values, cmap=cmap, norm=norm, interpolation='nearest',
extent=extents)
# plot motion vector
ax.quiver(
qx, qy, qu, qv, pivot='mid'
)
ax.text(
extents[0],
extents[1],
textwrap.dedent(
"""
Reflectivity
Based @ {baseTime}
"""
).format(
baseTime=basetime.strftime('%H:%MH')
).strip(),
fontsize=10,
va='bottom',
ha='left',
linespacing=1
)
ax.text(
extents[2] - (extents[2] - extents[0]) * 0.03,
extents[1],
textwrap.dedent(
"""
{validDate}
Valid @ {validTime}
"""
).format(
validDate=basetime.strftime('%Y-%m-%d'),
validTime=t.strftime('%H:%MH')
).strip(),
fontsize=10,
va='bottom',
ha='right',
linespacing=1
)
cbar_ax = fig.add_axes([0.875, 0.075, 0.03, 0.85])
cbar = fig.colorbar(
mappable, cax=cbar_ax, ticks=levels[1:], extend='max', format='%.3g')
cbar.ax.set_ylabel(ref_frames.attrs['values_name'], rotation=90)
fig.savefig(
os.path.join(
OUTPUT_DIR,
"steps-reflectivity.png"
),
bbox_inches='tight'
)
radar_image_time = pd.Timestamp.now()
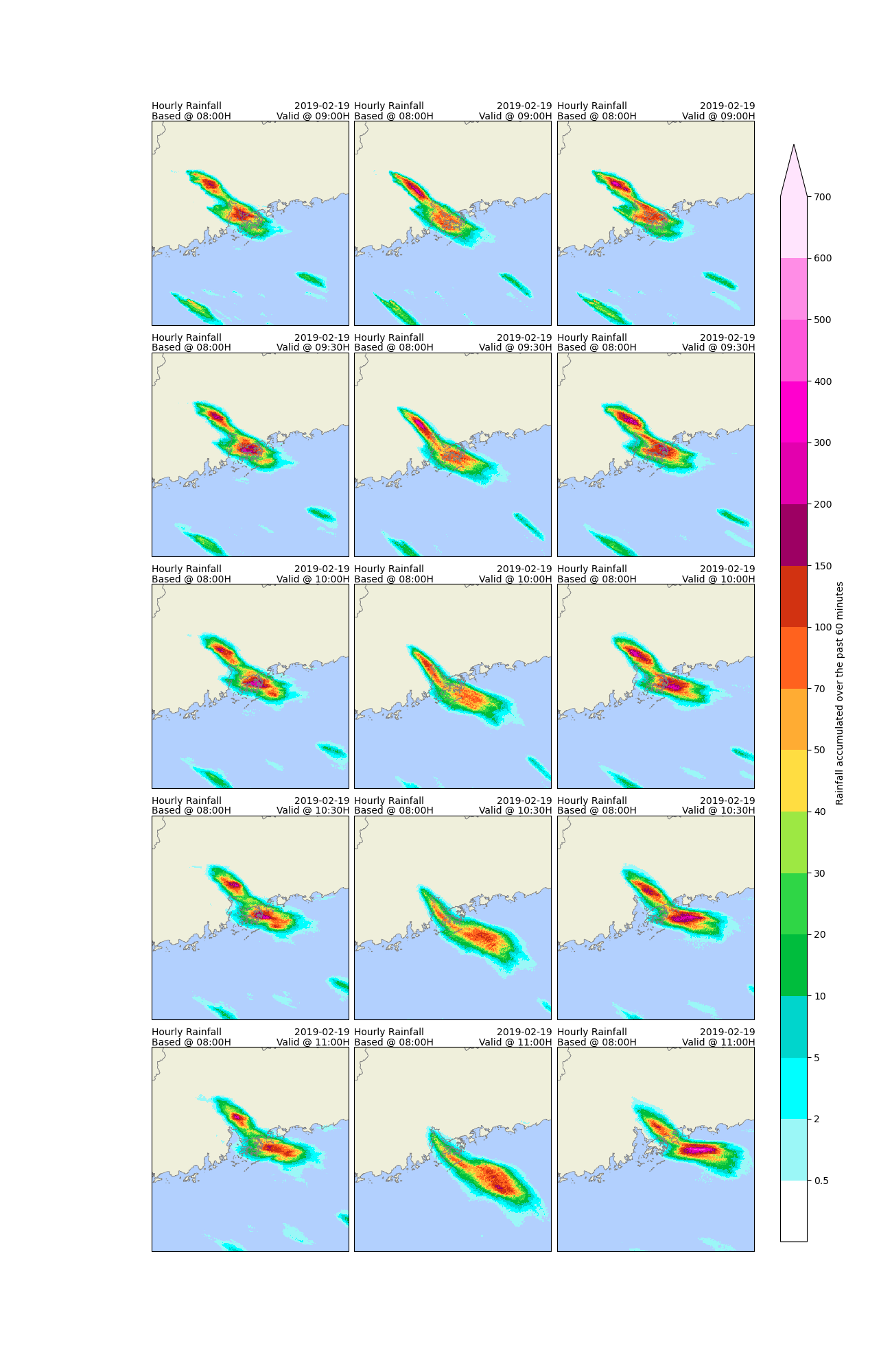
Accumulating hourly rainfall for 3-hour forecast
Hourly accumulated rainfall is calculated every 30 minutes, the first endtime is the basetime i.e. T+30min.
# Convert from rainfall rate to rainfall
rf_frames = conversion.to_rainfall_depth(ref_frames, a=58.53, b=1.56)
# Compute hourly accumulated rainfall every 30 minutes.
acc_rf_frames = []
for ens in rf_frames.coords['ensembles']:
af = conversion.acc_rainfall_depth(
rf_frames.sel(ensembles=ens).drop('ensembles'), basetime +
pd.Timedelta(minutes=60), basetime + pd.Timedelta(hours=3)
)
af_ensembles = af.assign_coords(ensembles=ens)
acc_rf_frames.append(af_ensembles.expand_dims('ensembles'))
acc_rf_frames = xr.concat(acc_rf_frames, dim='ensembles')
# Replace zero value with NaN
acc_rf_frames.data[acc_rf_frames.data <=
acc_rf_frames.attrs['zero_value']] = np.nan
acc_time = pd.Timestamp.now()
Generating radar reflectivity maps
# Defining colour scale
levels = [
0, 0.5, 2, 5, 10, 20,
30, 40, 50, 70, 100, 150,
200, 300, 400, 500, 600, 700
]
cmap = ListedColormap([
'#FFFFFF00', '#9bf7f7', '#00ffff', '#00d5cc', '#00bd3d', '#2fd646',
'#9de843', '#ffdd41', '#ffac33', '#ff621e', '#d23211', '#9d0063',
'#e300ae', '#ff00ce', '#ff57da', '#ff8de6', '#ffe4fd'
])
norm = BoundaryNorm(levels, ncolors=cmap.N, clip=True)
mappable = ScalarMappable(cmap=cmap, norm=norm)
mappable.set_array([])
time_steps = acc_rf_frames.coords['time'].values
n_rows = len(time_steps)
fig: plt.Figure = plt.figure(
figsize=(n_ens_members * 4 + 1, n_rows * 4), frameon=False)
gs = GridSpec(n_rows, n_ens_members, figure=fig,
wspace=0.03, hspace=-0.25, top=0.95, bottom=0.05, left=0.17, right=0.845)
for row in range(n_rows):
for col in range(n_ens_members):
ax = fig.add_subplot(gs[row, col], projection=crs)
ensemble = acc_rf_frames.coords['ensembles'].values[col]
t = time_steps[row]
# plot base map
plot_base(ax, extents, crs)
# plot accumulated rainfall depth
t = pd.Timestamp(t)
member = acc_rf_frames.sel(ensembles=ensemble)
frame = member.sel(time=t)
im = ax.imshow(frame.values, cmap=cmap, norm=norm, interpolation='nearest',
extent=extents)
ax.text(
extents[0],
extents[1],
textwrap.dedent(
"""
Hourly Rainfall
Based @ {baseTime}
"""
).format(
baseTime=basetime.strftime('%H:%MH')
).strip(),
fontsize=10,
va='bottom',
ha='left',
linespacing=1
)
ax.text(
extents[2] - (extents[2] - extents[0]) * 0.03,
extents[1],
textwrap.dedent(
"""
{validDate}
Valid @ {validTime}
"""
).format(
validDate=basetime.strftime('%Y-%m-%d'),
validTime=t.strftime('%H:%MH')
).strip(),
fontsize=10,
va='bottom',
ha='right',
linespacing=1
)
cbar_ax = fig.add_axes([0.875, 0.095, 0.03, 0.8])
cbar = fig.colorbar(
mappable, cax=cbar_ax, ticks=levels[1:], extend='max', format='%.3g')
cbar.ax.set_ylabel(acc_rf_frames.attrs['values_name'], rotation=90)
fig.savefig(
os.path.join(
OUTPUT_DIR,
"steps-rainfall.png"
),
bbox_inches='tight'
)
ptime = pd.Timestamp.now()
Checking run time of each component
print(f"Start time: {start_time}")
print(f"Initialising time: {initialising_time}")
print(f"Motion field time: {motion_time}")
print(f"STEPS time: {steps_time}")
print(f"Plotting radar image time: {radar_image_time}")
print(f"Accumulating rainfall time: {acc_time}")
print(f"Plotting rainfall maps: {ptime}")
print(f"Time to initialise: {initialising_time - start_time}")
print(f"Time to run motion field: {motion_time - initialising_time}")
print(f"Time to perform STEPS: {steps_time - motion_time}")
print(f"Time to plot radar image: {radar_image_time - steps_time}")
print(f"Time to accumulate rainfall: {acc_time - radar_image_time}")
print(f"Time to plot rainfall maps: {ptime - acc_time}")
print(f"Total: {ptime - start_time}")
Out:
Start time: 2025-10-11 04:45:03.484799
Initialising time: 2025-10-11 04:45:05.099887
Motion field time: 2025-10-11 04:45:06.457769
STEPS time: 2025-10-11 04:45:29.660046
Plotting radar image time: 2025-10-11 04:45:58.451244
Accumulating rainfall time: 2025-10-11 04:46:00.770860
Plotting rainfall maps: 2025-10-11 04:46:36.091630
Time to initialise: 0 days 00:00:01.615088
Time to run motion field: 0 days 00:00:01.357882
Time to perform STEPS: 0 days 00:00:23.202277
Time to plot radar image: 0 days 00:00:28.791198
Time to accumulate rainfall: 0 days 00:00:02.319616
Time to plot rainfall maps: 0 days 00:00:35.320770
Total: 0 days 00:01:32.606831
Total running time of the script: ( 1 minutes 31.399 seconds)